EcoClaw Autonomous Waste Management Robot
Our core offering is a sophisticated, Arduino-based autonomous robotic vehicle designed for the safe and efficient handling, transport, and delivery of hazardous waste containers within industrial indoor environments.
Hazardous Waste Management with Robotics
The EcoClaw robot represents the future of intelligent industrial waste management-combining advanced sensor systems, intelligent navigation algorithm, efficient wireless power transfer and secure handling mechanisms to create a comprehensive solution for hazardous material transport.
Designed with safety and effciency as its core, our robot operates autonomously in industrial environments, reducing human exposure to potentially harmful materials while optimizing operational workflows.
EcoClaw Robot Concept
Our innovative hardware components working together to create a seamless autonomous solution
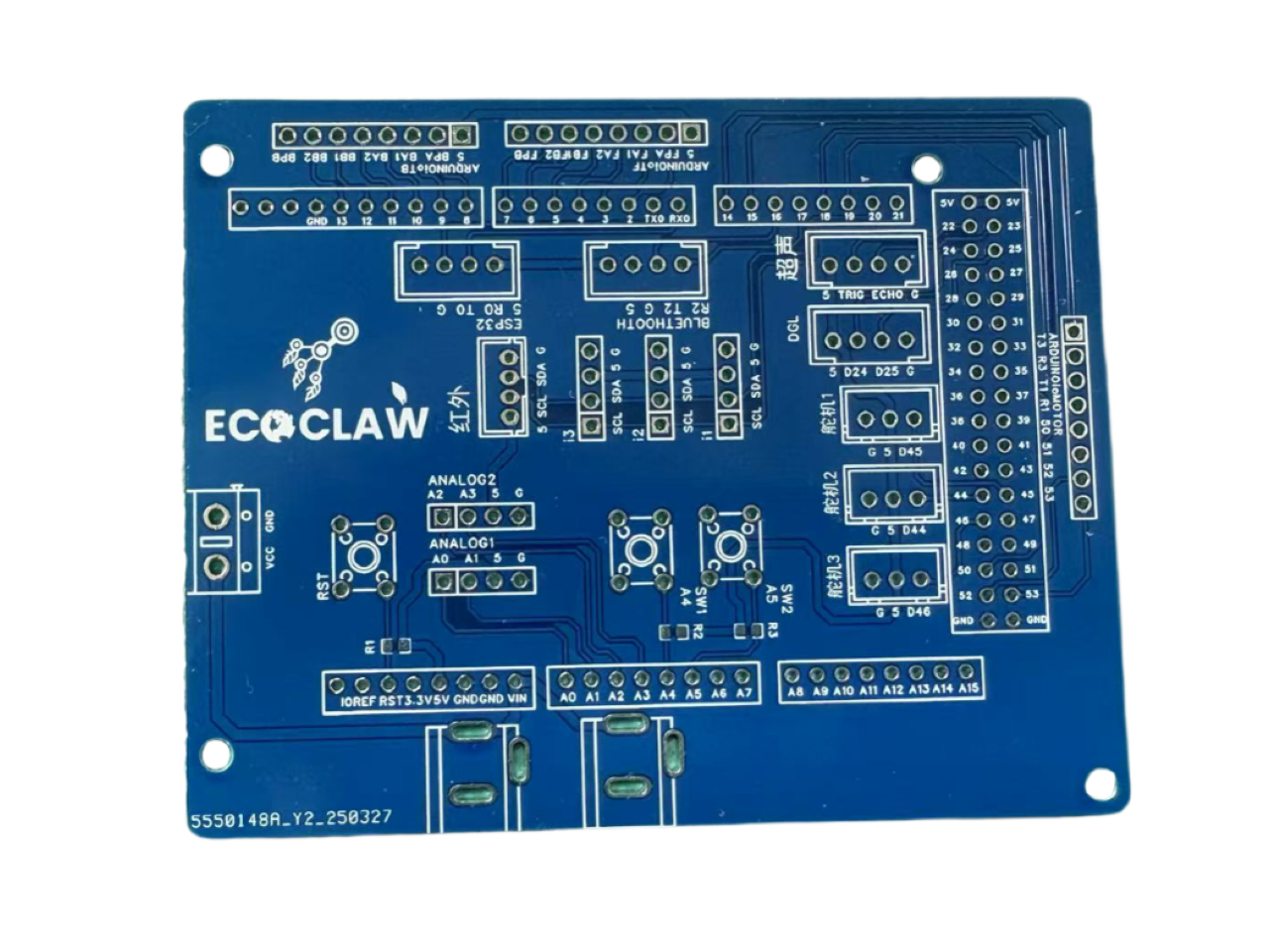
Sensor and Servo Shield Board
The Sensor and Servo Shield Board is a versatile extension designed to enhance the capabilities of your Arduino Mega. This shield provides an efficient and user-friendly solution for connecting and controlling three sensors (ultrasonic, color, and infrared) as well as three servos for robotic arm control. By integrating these components into a single board, it simplifies wiring and ensures stable operation, making it ideal for complex automation and robotics projects.
Technical Specifications:
- 1.Designed specifically for Arduino Mega, ensuring seamless integration with existing Arduino ecosystems and integrating Sensor Interfaces and servos.
- 2.Dedicated power pins for sensors and servos to ensure stable operation.
- 3.Integrated plug-in design for secure connections, reducing the risk of loose wires and ensuring system stability.
- 4.Multiple power interfaces, supporting 5-10V DC power supply
Key Applications:
By incorporating our Sensor and Servo Shield Board into your system, you gain a robust and versatile solution that enhances performance, reliability, and ease of use. The integrated design ensures stable operation and simplifies complex wiring, making it an essential component for the system.
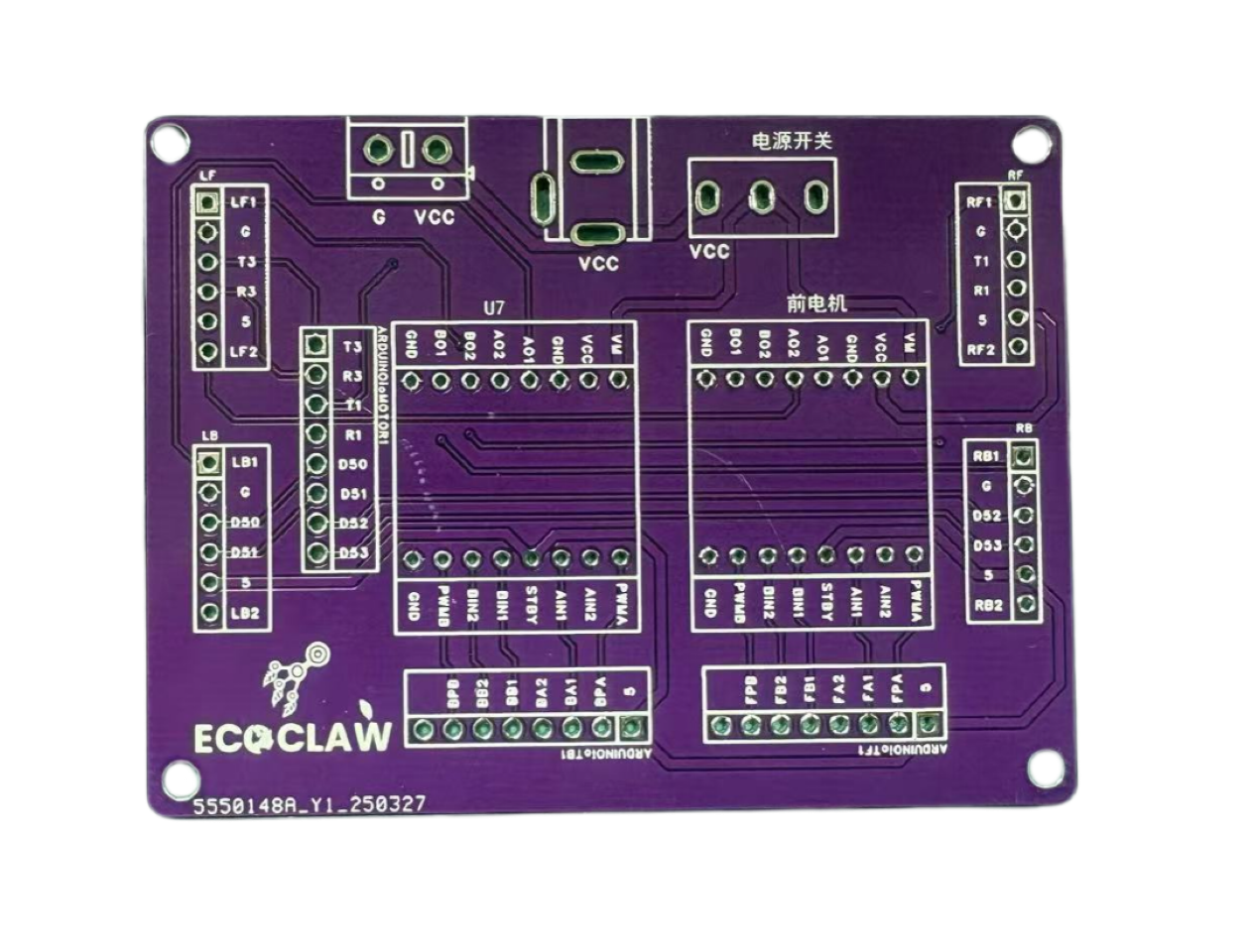
Motor Driver Shield Board
Our Motor Driver Shield Board is a versatile and powerful extension designed to enhance the capabilities of your Arduino Mega. This shield provides an efficient and user-friendly solution for driving motors, enabling precise control and seamless integration into the projects.
Technical Specifications:
- 1.Designed specifically for Arduino Mega, ensuring perfect integration with existing Arduino ecosystems.
- 2.Supporting up to four DC Hall motors, providing flexibility for various applications.
- 3.Supports two TB6612 motor drivers to provide reliable output for the motors.
- 4.Enhancing circuit connection stability and improving car reliability.
Key Applications:
Powers the robot's mobility system, enabling precise movements along predefined paths. The driver's sophisticated control algorithms allow for smooth acceleration, deceleration, and turning, while maintaining accurate tracking of line-following sensors for reliable navigation through complex industrial environments.
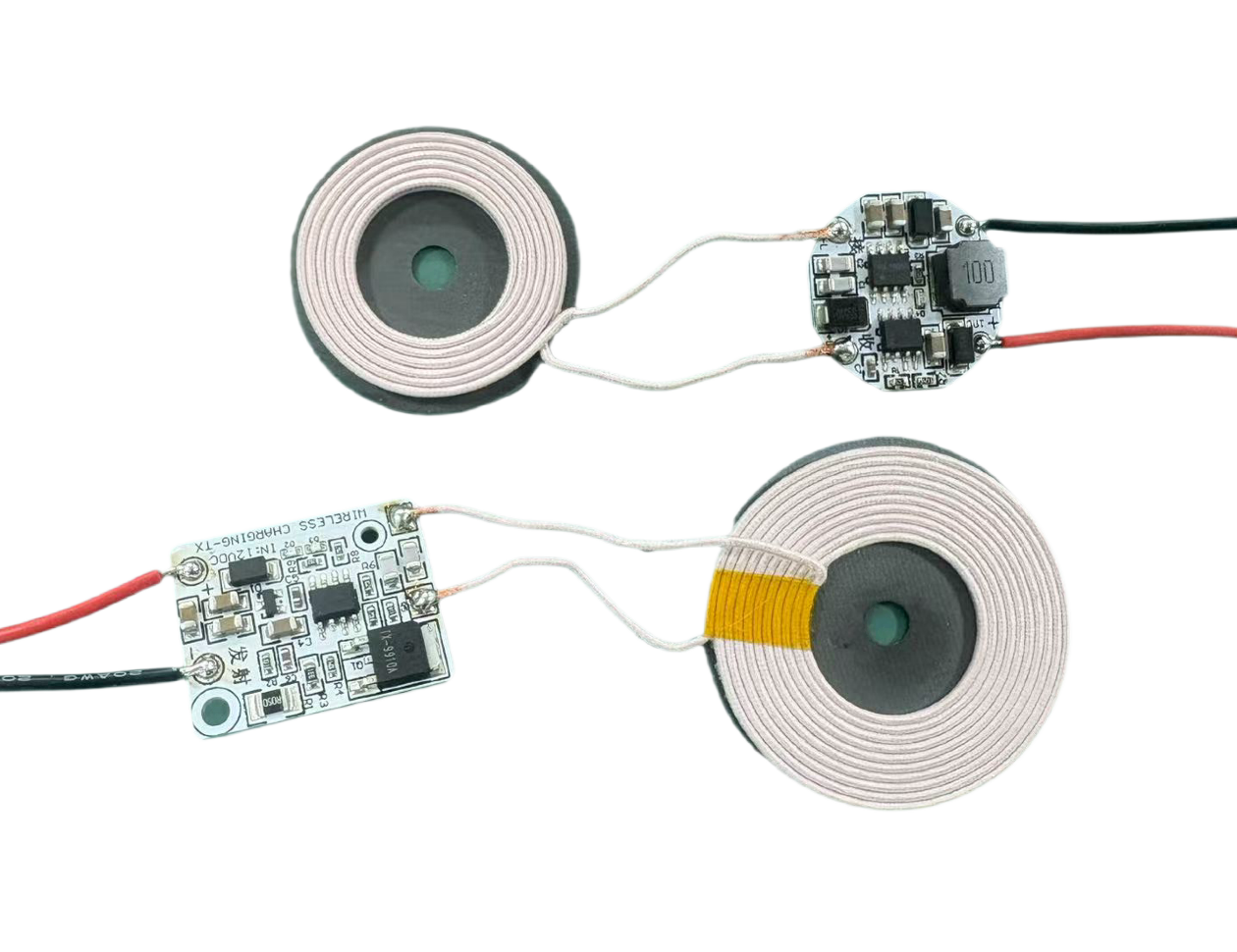
Wireless Power transfer
The wireless power transfer system is revolutionizing the way automated vehicles are powered. Designed for efficiency and convenience, this system eliminates the need for cumbersome cables and connectors, providing an innovative charging solution. With a growing demand for wireless charging technologies across various industries, our system stands at the forefront of innovation, offering a competitive edge in the rapidly expanding market.
Technical Specifications:
- 1.Integrated an LDO topology with input voltage 12V and output Voltage 8.4V and low voltage ripples
- 2.Transmission distance 9mm and current at approximately 0.8A with high efficiency.
Key Applications:
The wireless power transfer system is perfect for powering AGVs and providing convenient charging solutions. It also offers a flexible platform for prototyping and testing new wireless power transfer technologies, accelerating innovation. By leveraging advanced technologies and efficient power transfer methods, our system sets a new standard in wireless charging, attracting customers seeking cutting-edge solutions.
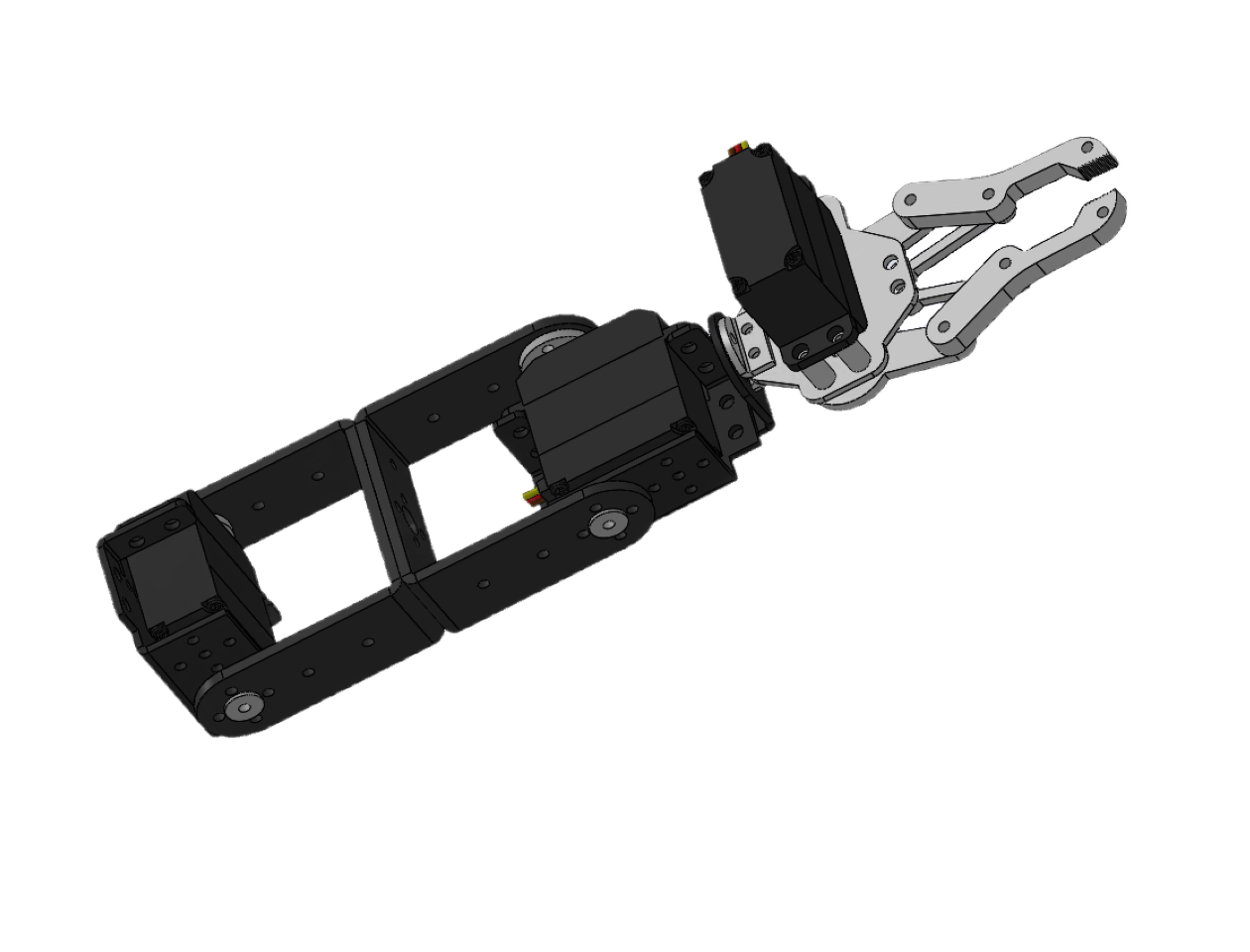
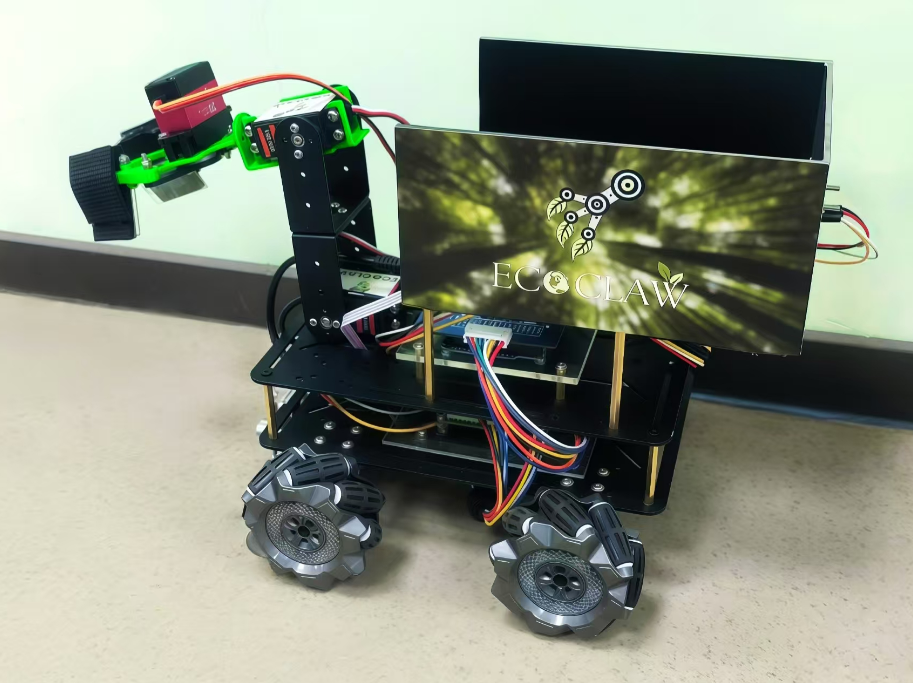
Robotic Arm
The EcoClaw Robotic Arm is a specialized gripper mechanism engineered specifically for the secure handling of hazardous waste containers. Featuring a multi-jointed design with precision servo motors this arm combines strength, dexterity, and reliability to safely manipulate various container types in industrial environments without human intervention.
Technical Specifications:
- 1. Degrees of Freedom and Flexibility: The robot arm has 3 Degrees of Freedom (DOF), therefore supporting multi-angle and multi-directional grasping operations.
- 2. Precision and Reliability: With high-precision sensors and control systems, its accuracy in every operation is ensured.
- 3.Rigorously tested for durability, supporting that continuous operation can be carried on over extended periods.
- 4. High Torque Servo Motors: The robot arm has a torque capacity of 20kg·cm for heavy-duty grasping.
Key Applications:
Designed for picking up, transporting, and precisely placing hazardous waste containers of various shapes and sizes. The arm's adaptive gripper system can accommodate different container types while maintaining secure handling throughout the transport process, minimizing risk of spills or accidents.
System Demonstration
Our core technology is validated through the successful development and demonstration of the B39VS_Car, a functional proof-of-concept prototype. This scaled model showcases key capabilities including autonomous navigation via line and color sensing, secure container pickup and placement using a gripper mechanism, and obstacle awareness within a controlled environment.
Core Capabilities & Features
Autonomous Navigation & Path Following
- Capable of autonomous navigation through a specified number of rooms, departments, or zones within a facility.
- Utilizes line identification and following sensors for precise tracking of predefined routes.
- Employs color sensors to identify specific destinations, staging areas, and potentially container types based on color-coded markings and containers.
- Designed to operate reliably without continuous operator intervention once a task is initiated.
Secure Container Handling & Transport
- Integrated gripper system capable of securely picking up various hazardous material containers.
- Features a secure bay that locks automatically once container placement is detected, maintaining security during transport.
- Follows a defined workflow: navigate to pickup point, locate container, verify with color sensor (optional step based on scenario), pickup container, secure bay, transport to base, unload into appropriate staging space.
- Handles operations involving multiple pickup points, returning containers to a primary base/staging area.
Advanced Safety & Obstacle Management
- Uses distance sensors (e.g., ultrasonic, infrared) to detect personnel or objects obstructing its path.
- Initiates audible commands or signals to notify individuals to clear the way.
- If no response is detected or the obstacle persists, the robot is designed to attempt finding an alternative route (requires appropriate path planning logic).
- Prioritizes safe operation, minimizing risks to personnel and equipment.
System Integration & Communication
- Core control based on the reliable Arduino microcontroller platform.
- Includes user interface (details TBD - could be simple buttons/web interface) and clear LED indicators for status updates (e.g., navigating, carrying load, charging, error).
- [Advanced Feature] Capable of communicating its operational status (e.g., location, task progress, battery level) back to a main computer system for monitoring.
Energy Management & Charging
- Intelligent power management system optimizes battery usage.
- Automatically returns to charging station when battery is low.
- Supports fast charging for minimal downtime.
- Battery health monitoring for long-term reliability.
Performance Analytics
- Records operational metrics for performance analysis.
- Provides data on task completion times and efficiency.
- Generates reports for operational optimization.
- Identifies potential maintenance needs proactively.
Hardware & Design Specifications
Technical details and design parameters of our EcoClaw robot
Utilizes at least two motors (up to six allowed) for robust mobility and precise control.
Integrates necessary sensors: one color sensor, multiple distance sensors for environment perception.
Compact design, aiming for a 30cm x 30cm x 30cm volume for efficient operation in tight spaces.
Includes a charging solution designed for the robot's base, enabling autonomous charging cycles.
Lightweight construction with high-strength materials for optimal weight-to-strength ratio.
Arduino-based control system with expandable I/O for future sensor and actuator integration.
Specialized gripper mechanism capable of handling various container shapes and sizes securely.
Maximum speed of 0.5 m/s with precise speed control for safe operation in indoor environments.
Proof of Concept: The B39VS_Car Project
From concept to reality - our working prototype demonstrates core capabilities
To validate our design and showcase core functionality, we developed the B39VS_Car prototype. This fully operational, scaled-down system served as a proof-of-concept, demonstrating the integration of navigation, perception, and handling mechanisms.
Key features demonstrated include:
- Line following for path navigation.
- Color detection for zone/container identification.
- Obstacle detection and basic avoidance/alerting.
- Gripper mechanism for container interaction.
- Arduino-based control logic.
This PoC provided tangible evidence of our system's feasibility and served as the foundation for the full-scale industrial solution. It allowed for iterative testing and refinement in a controlled setting.
Innovating for a Safer Tomorrow
EcoClaw is committed to pushing the boundaries of autonomous technology to create safer, more efficient, and compliant industrial workplaces.